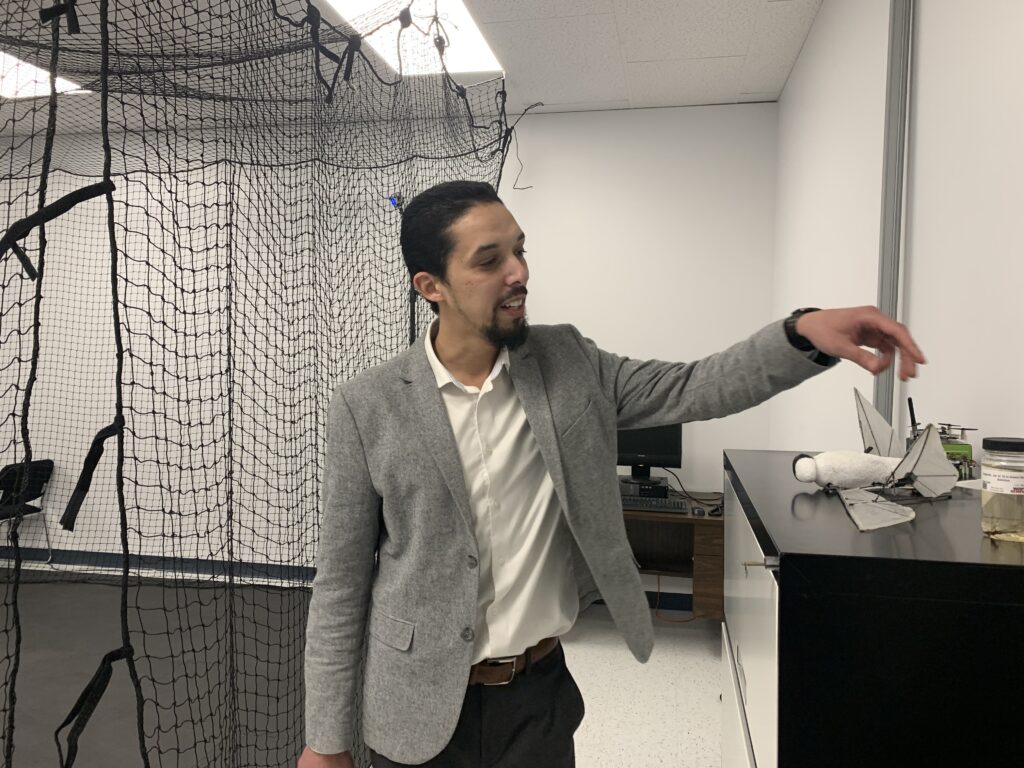
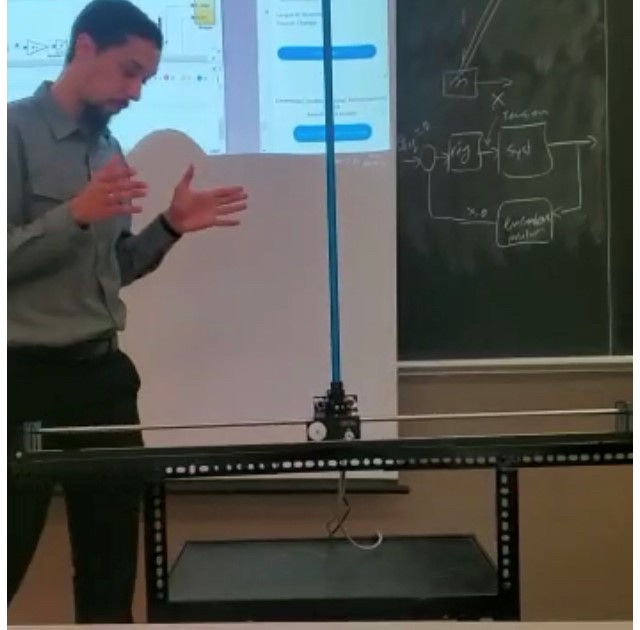
Photo taken at UQO during summer 2022 From left to right: T. Bhattacharjee (intern), K. Paulose (intern), and S. Berkane (professor).Lunch with Dr. Satoshi Nakano from Nagoya Institute of Technology (Japan) – Visit to UQO, May 2025Dr. Bekane explaining the concept of bio-inspired micro dronesDr. Berkane at LaRSA labDr. Berkane explaining the research activities carried out at LaRSA lab to a visiting group from CRIAQDr. Berkane explaining the concept of feedback control using Quanser’s linear inverted pendulum platform